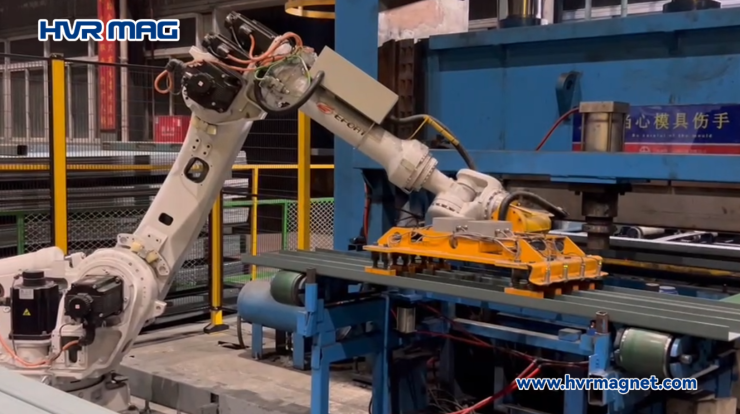
The electro permanent magnetic EOAT is an automated device used in industrial production to achieve fast picking and handling of ferromagnetic objects. It is characterized by high efficiency and precision. They can be classified into two forms: fixed and mobile. Generally speaking, fixed EOAT are more suitable for automated gantry crane, while mobile EOAT are more suitable for robots.
Lifting Capacity of Magnetic EOAT
The general lifting capacity of an electromagnetic end effector is between 5kg and 2000kg. This can to be adapted to the corresponding load capacity of the robot or gantry system.
The gripping range of an electromagnetic end effector typically ranges from 25mm to 5 meters. The range of gripping is mainly determined by factors such as the weight of the product, the amount and size of the magnetic material used.
Operating Method of Magnetic EOAT
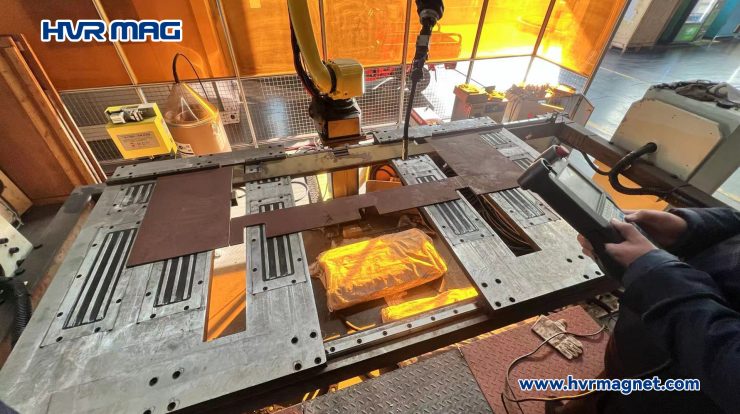
The magnetic EOAT can be divided into two operating modes: manual and automatic. In the manual mode, it requires manual manipulation to perform the gripping action, while in the automatic mode, it can be controlled and operated through system integration.
Conclusion
The design and parameters of a magnetic EOAT primarily depend on the application conditions. Factors such as the weight and size of the objects to be lifted, the required gripping force, the operating environment, and any specific safety requirements all play a role in determining the design and parameters of the electromagnetic end effector. It is important to consider these factors to ensure proper functionality and efficiency in the intended application.
For more information, please contact HVR MAG at export@hvrmagnet.com