What Does EOAT Stand for?
It’s the abbreviation of end-of-arm tool or end-of-arm tooling.
What Is EOAT?
It refers to the equipment that interacts with parts and components, typically at the end of a robotic arm. As a crucial aspect of robotic technology, EOAT gives a robot a specific functionality and can be changed to fit different applications or even be built to accommodate several processes at once.
End of Arm Tooling Examples
There are many different types of EOAT for robots on the market: grippers, welding torches, force-torque sensors, material removal tools, collision sensors, tool changers and more. They’re powered either electrically, hydraulically, mechanically or pneumatically. The application dictates which type of EOAT is needed.

Below is a list of the most common types of EOAT for robots:
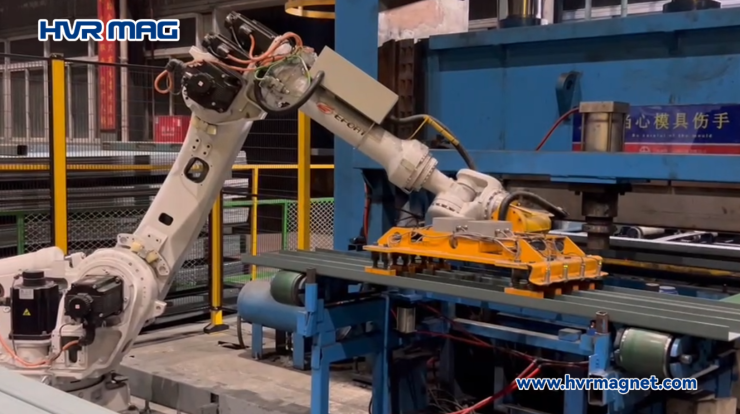
Grippers: popularly used for grasping objects and are especially suitable for assembly and pick and place applications. Vacuum Grippers, Magnetic Grippers, Mechanical Grippers.
Sensors: extends your automation possibilities as they provide your robot with a sense of touch. Collision sensors, Force/torque sensors.
Tools: end effectors and tools like shears, drills, welding torches, paint guns, deburring tools etc.
Tool changers: designed to add flexibility to robotic automation processes by enabling robot operators to change tooling quickly and without hassle.
As pick and place applications are prime targets for automation and the gripping capabilities of robots has advanced significantly in recent years, EOAT is becoming an essential part of a robotic system. So it is with magnetic grippers in automation.