What we need to do when using electro permanent magnets for industrial robots
What are the precautions when operating magnetic gripper for robotic arm?
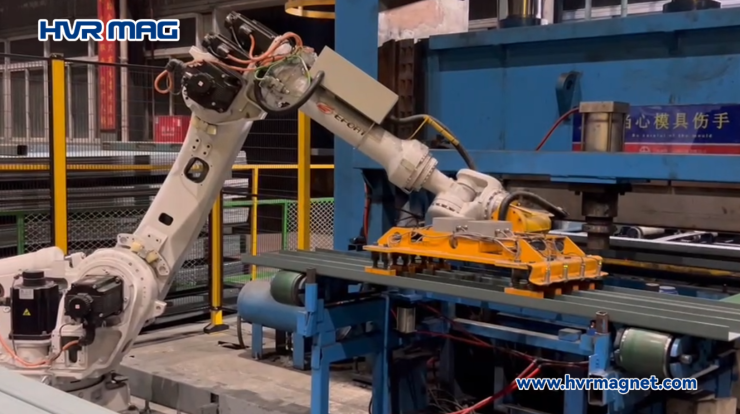
Let us give a simple introduction of electro permanent magnetic gripper for robotic arm in automation production:
After we install the electro permanent magnet on industrial robots, it can do up and down movement and rotary movement through the positioning or vision system. The magnetic gripper for the robotic arm only needs to be magnetized before use. No electricity is needed during the working (handling) process, ensuring that the workpiece will not fall in case of power failure. The use of electro permanent magnetic gripper for robots can reduce the labor intensity, achieve light operation and accurate positioning when handling large mass workpieces. Thus it helps to realize fully intelligent and unmanned production.
Do & don’t for magnetic gripper for robotic arm tooling:
1. The robot should be kept away from the equipment and personnel once started. It can help to avoid accidents such as injuries caused by sudden arm cocking.
2. When the electro permanent magnet is not in use, check whether the button is in a demagnetized state.
3. The lifting weight of the electro permanent magnet shall not exceed the designed rated lifting weight.
4.No hands, feet, or any part of the body shall be stretched under the load.
5. Do not operate the robot arm with load before confirming whether the workpiece is clamped, to avoid the workpiece slipping or falling.
6. Do not violently shake the robot arm. That is, do not use the operation method that makes the load deflected and collapsed.
7.No one else shall enter the work site when the operator is working.
8. When the operator leaves the work site, the robot arm should be placed in the idle position, and the robot magnetic gripper to be in a very low place.
9. Clean the magnetic pole surface every month, to avoid dust or other stains, and avoiding magnetic force decline.
So, as above mentioned, the 9 points are the precautions we need to know and do when operating the magnetic gripper for robotic arm tooling.